This is a project at Chalmers consisting of implementing a control system generated from Supervisory Control Theory.
Problem description
"Operation sequencing and resource safety is a non-trivial task within modern manufacturing systems. Typically, this task is handled manually which is time-consuming and error-prone. Whether a particular system works correctly is determined by how long it has been able to function without severe error. Obviously this situation is not sustainable and can be greatly improved by using software tools and mathematics to guarantee correct functionality. Such "model-based formal methods" is one main part of the research within the Automation group at Chalmers. This project aims at implementing a proof-of- concept of existing methods."
Present at IFAC 2014
Our paper was good enough to be presented by our examiner, Martin Fabian, at IFAC 2014. http://www.ifac2014.org/
Our solution
1. Create a model of the sequence:

Sequence to manufacture a full car
2. Express it as automatas:

Representation of operations as automata
3. Extract guards to forbid bad behaviors e.g. deadlocks and forbidden states:

Guard extraction from non-blocking supervisor
4. The HMI is implemented in HTML5 and AngularJS that communicates to the OPC server of the PLC:

The HMI with only executable operations being shown
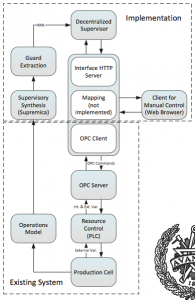
Overview of the system and the implementation
Download the article Robust Manual Control of a Manufacturing System using Supervisory Control Theory in collaboration with Martin Fabian.
Download the source code from Bitbucket







